Abstract
 Inspired by the human ability to perform complex manipulation in the
complete absence of vision (like retrieving an object from a pocket),
the robotic manipulation field is motivated to develop new methods for
tactile-based object interaction. However, tactile sensing presents the
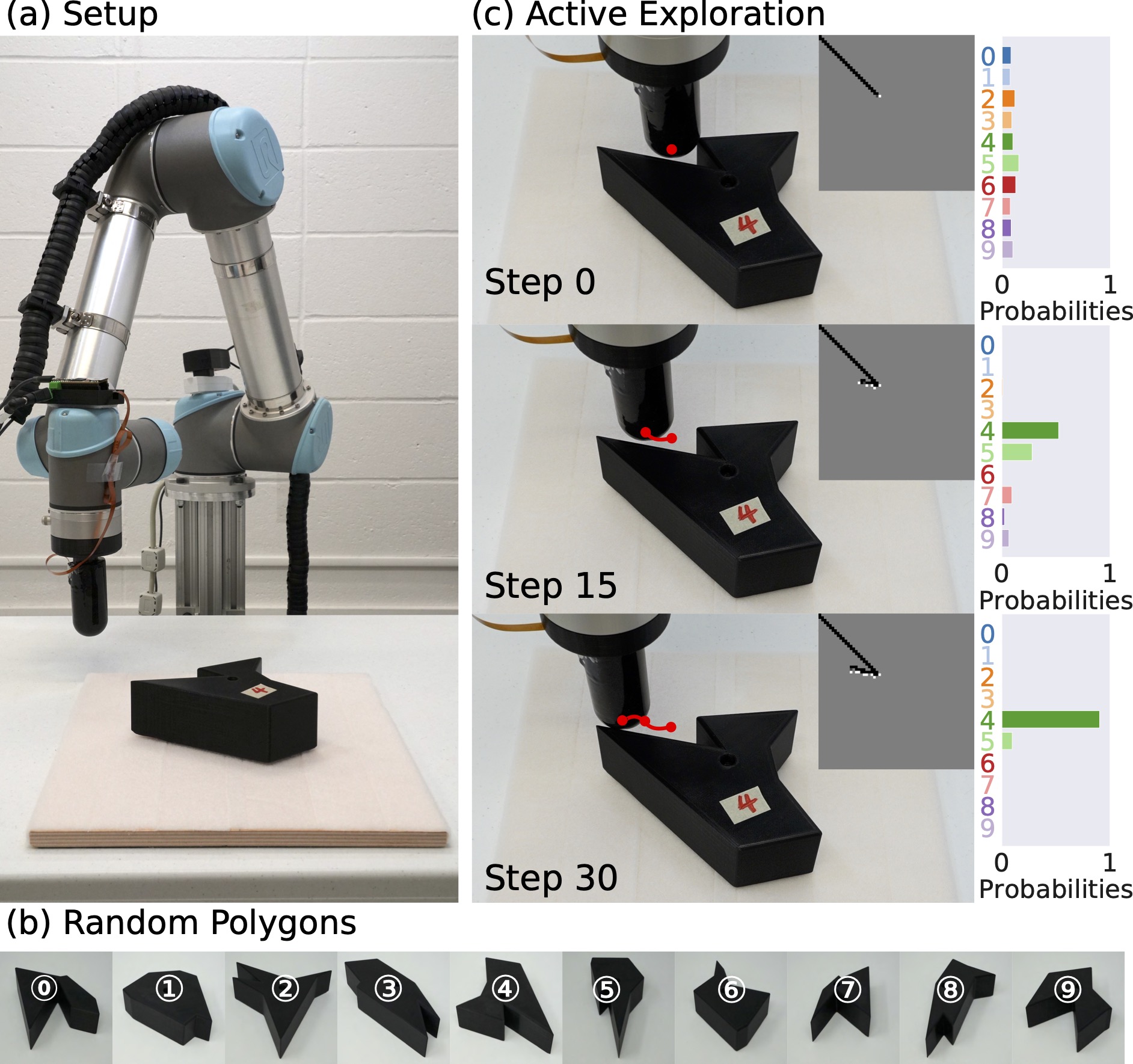
challenge of being an active sensing modality: a touch sensor provides
sparse, local data, and must be used in conjunction with effective
exploration strategies in order to collect information. In this work, we
focus on the process of guiding tactile exploration, and its interplay
with task-related decision making. We propose TANDEM
(TActile exploration aNd
DEcision Making), an architecture to learn efficient
exploration strategies in conjunction with decision making. Our approach
is based on separate but co-trained modules for exploration and
discrimination. We demonstrate this method on a tactile object
recognition task, where a robot equipped with a touch sensor must
explore and identify an object from a known set based on binary contact
signals alone. TANDEM achieves higher accuracy with fewer actions than
alternative methods and is also shown to be more robust to sensor noise.
Inspired by the human ability to perform complex manipulation in the
complete absence of vision (like retrieving an object from a pocket),
the robotic manipulation field is motivated to develop new methods for
tactile-based object interaction. However, tactile sensing presents the
challenge of being an active sensing modality: a touch sensor provides
sparse, local data, and must be used in conjunction with effective
exploration strategies in order to collect information. In this work, we
focus on the process of guiding tactile exploration, and its interplay
with task-related decision making. We propose TANDEM
(TActile exploration aNd
DEcision Making), an architecture to learn efficient
exploration strategies in conjunction with decision making. Our approach
is based on separate but co-trained modules for exploration and
discrimination. We demonstrate this method on a tactile object
recognition task, where a robot equipped with a touch sensor must
explore and identify an object from a known set based on binary contact
signals alone. TANDEM achieves higher accuracy with fewer actions than
alternative methods and is also shown to be more robust to sensor noise.
Supplementary Video (1min30sec)
IROS Presentation Video (7min)
Individual Real-world Demonstrations
The first example of each object corresponds to Figure 5 examples in the paper.Object 0
Object 1
Object 2
Object 3
Note: sensor noise before first contact is observed in example 1.
Object 4
Note: sensor noise after contact is observed in example 2.
Object 5
Object 6
Object 7
Note: in example 2, our method almost converges on object 1 but then it takes advantage of the non-collision space and quickly converges on object 7.
Object 8
Note: sensor noise before first contact is observed in example 1.
Object 9
Note: sensor noise after contact is observed in example 2.
BibTex
@article{xu2022tandem,
title={TANDEM: Learning Joint Exploration and Decision Making with Tactile Sensors},
author={Xu, Jingxi and Song, Shuran and Ciocarlie, Matei},
journal={IEEE Robotics and Automation Letters},
year={2022},
publisher={IEEE}
}Acknowledgment
This material is based upon work supported by the National Science Foundation under Award No. CMMI-2037101. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.