
James (Jingxi) Xu
jxu at cs dot columbia dot edu
Senior Research Scientist
Ant Group
Visiting Postdoctoral Scholar
Biomimetics & Dexterous Manipulation Laboratory (BDML)
Stanford University
I am a Senior Research Scientist at Ant Group, and I am also a Visiting Postdoctoral Scholar with Mark Cutkosky at Stanford. Before that, I was a Research Scientist at the Boston Dynamics AI Institute (a.k.a. the RAI Institute). I obtained my PhD in Computer Science from Columbia, where I was co-advised by Matei Ciocarlie (Columbia) and Shuran Song (Stanford). I received my bachelor’s degree from Edinburgh, with First Class Honours and Class Medal (overall grade ranks first in class), and I received an MS from Columbia, where I worked closely with Professor Peter Allen. I also spent some time at MIT (with Leslie Pack Kaelbling and Tomás Lozano-Pérez) and UPenn (with Dinesh Jayaraman and Nikolai Matni).
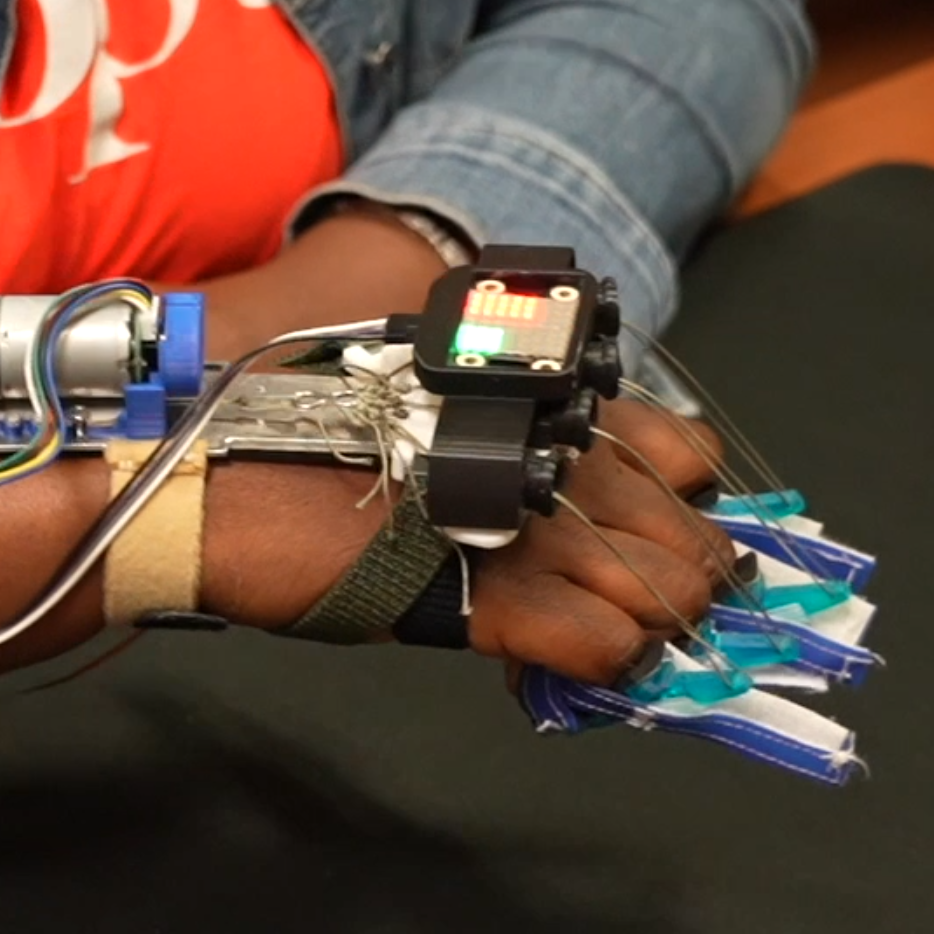
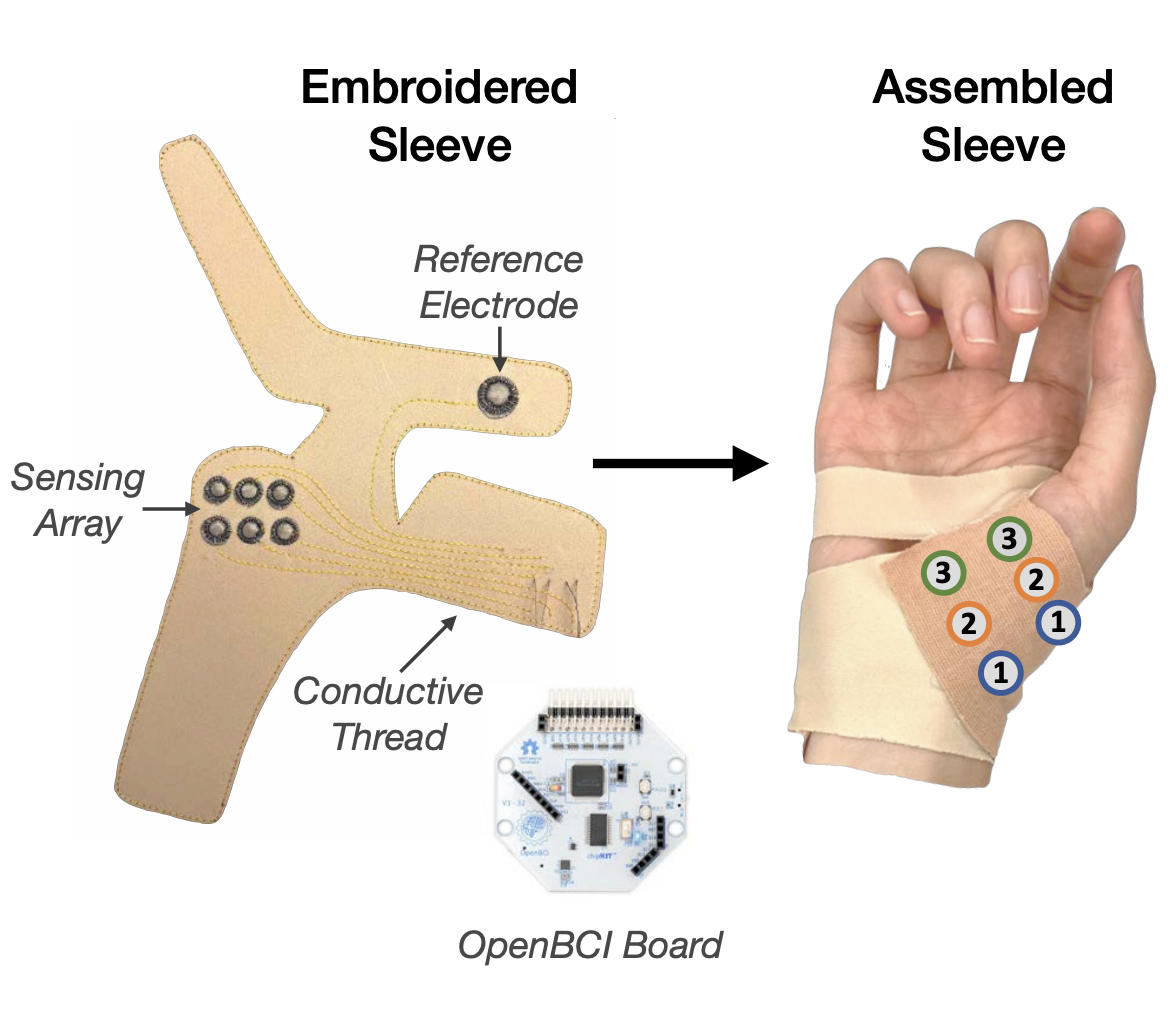
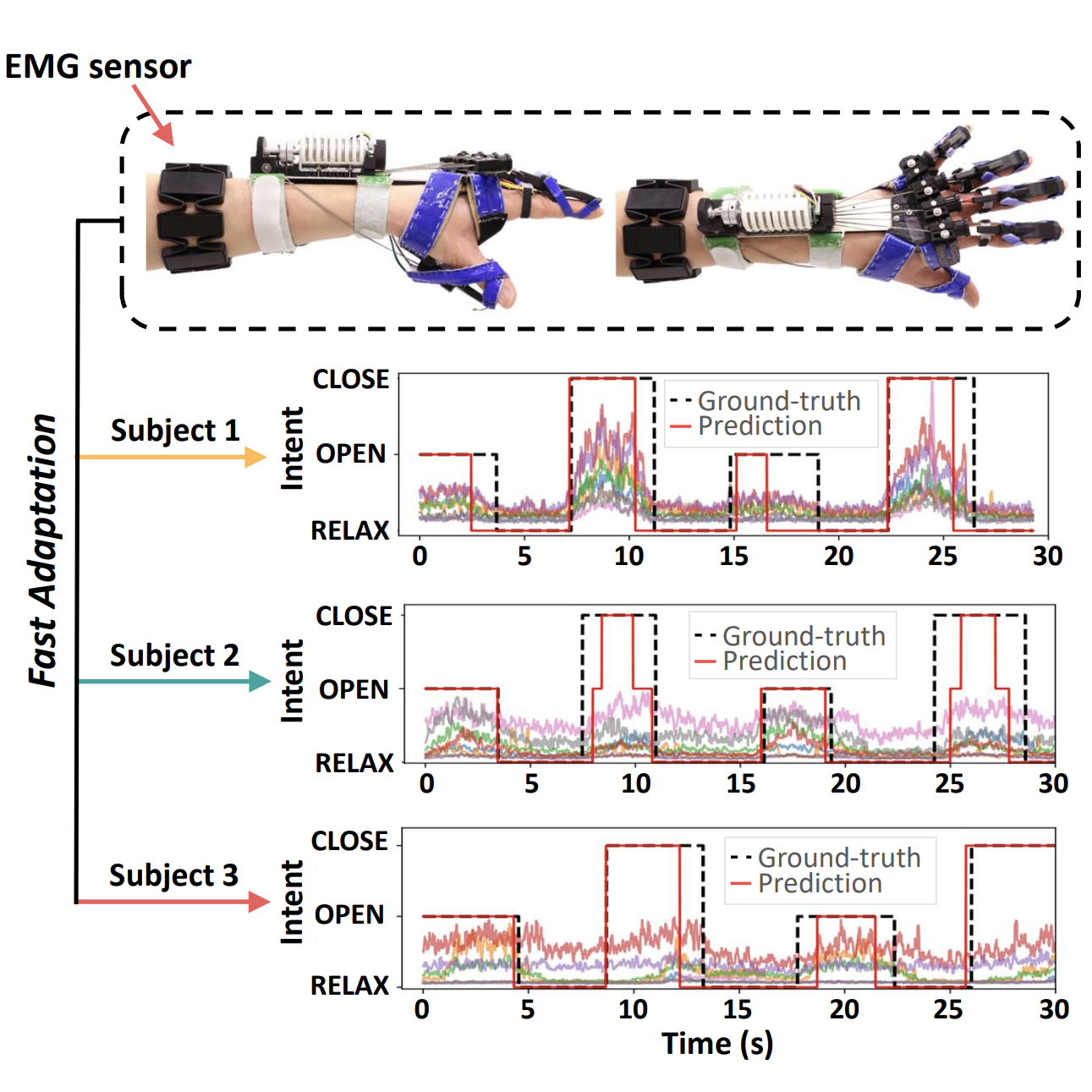
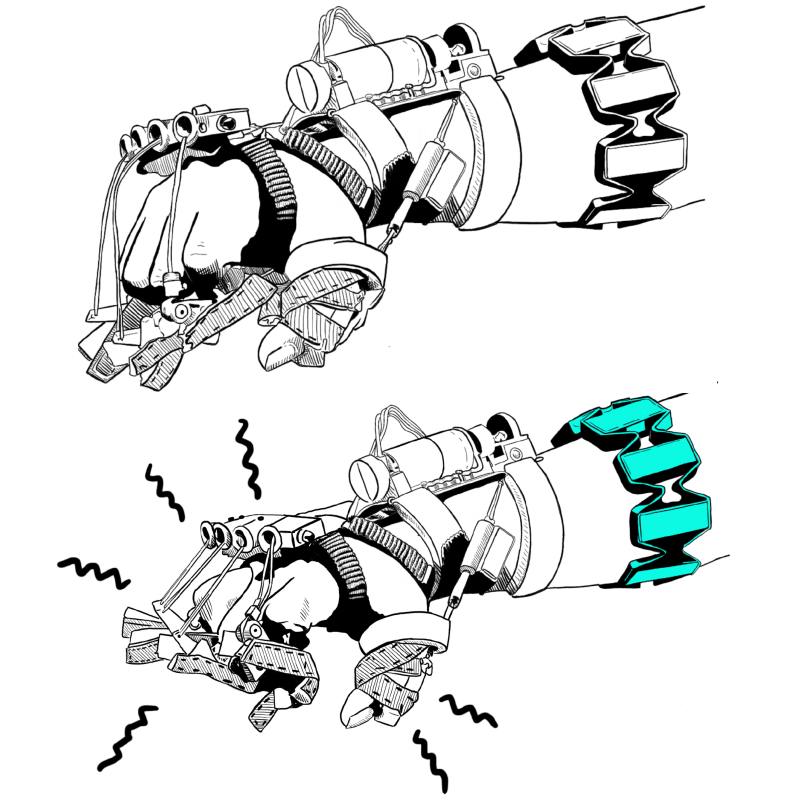
My research focuses are robotics, machine learning and healthcare. My most recent line of work [RA-L'24, IROS'24, ICRA'22] builds wearable assistive and rehabilitation robots that use machine learning to predict user intent from multimodal biosignals for people with disabilities. I also develop efficient exploration and manipulation policies with tactile sensing [AuRo'25, ICRA'23, RA-L'22]. At the same time, I am a multifaceted roboticist with research experience in a variety of applications such as dynamic grasping [CASE'24, IROS'21], visual navigation [IROS'20], motion planning [CoRL'20], optimal control [L4DC'21], and brain-computer interface [ICRA'20]. My talk at Ai2 provides a good summary of my PhD research and thesis.
Highlights
News
- [2026-04] Honored to be selected for RSS Pioneer 2026.
- [2025-08] I successfully defended my thesis. Great thanks to my committee: Matei Ciocarlie, Shuran Song, Carl Vondrick, Lerrel Pinto, and Brenna Argall. Checkout my thesis: Robot Learning with Sparsity and Scarcity for more details.
- [2024-10] I gave a talk at the Stanford Vision and Learning Lab (SVL), hosted by Fei-Fei Li.
- [2024-05] I received the Computer Science Service Award from Columbia University.
- [2024-02] GEOTACT is in the IEEE Spectrum Video Friday roundup.
- [2022-08] Our paper on thumb stabilization is selected as Best Paper Finalist at BioRob 2022.
- [2022-03] Our work on developing a hand orthosis to help stroke patients reuse their hands is now featured on the latest issue of Columbia Engineering magazine: Better Living with Robots.
- [2019-04] I am deeply honored to receive the Andrew P. Kosoresow Memorial Award for Excellence in Teaching and Service from the Computer Science Department.
- [2018-08] I received the CA Fellowship (≤ 2%) from Columbia University.
- [2017-06] I started an internship at arm, Cambridge, UK, working on CPU pipeline visualization.
- [2017-05] I graduated from the University of Edinburgh with First Class Honours and Class Medal (overall grade ranks first in class).
Publications
*: indicating equal contribution or alphabetic ordering. You can also check my
Google Scholar
profile.
(Co-)First-author papers are highlighted.
-
Autonomous Robots (AuRo) 2025Media Coverage: [IEEE Spectrum Video Friday]
-
-
 International Conference on Rehabilitation Robotics (ICORR) 2025
International Conference on Rehabilitation Robotics (ICORR) 2025 -
 International Conference on Rehabilitation Robotics (ICORR) 2025[arXiv]
International Conference on Rehabilitation Robotics (ICORR) 2025[arXiv]
-
 International Conference on Intelligent Robots and Systems (IROS) 2024[arXiv]
International Conference on Intelligent Robots and Systems (IROS) 2024[arXiv] -
🏆 NeurIPS Registration Award5th Robot Learning Workshop at Neural Information Processing Systems (NeurIPS) 2022International Conference on Automation Science and Engineering (CASE) 2024
-
 International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2024[arXiv]
International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2024[arXiv] -
 International Conference on Robotics and Automation (ICRA) 2024[arXiv]
International Conference on Robotics and Automation (ICRA) 2024[arXiv] -
 Conference on Virtual Reality and 3D User Interfaces (VR) 2024[IEEEXplore] [Video]
Conference on Virtual Reality and 3D User Interfaces (VR) 2024[IEEEXplore] [Video] -
 American Occupational Therapy Association (AOTA) INSPIRE Conference 2024[Poster]
American Occupational Therapy Association (AOTA) INSPIRE Conference 2024[Poster]
-
International Conference on Robotics and Automation (ICRA) 2023
-
Robotics and Automation Letters (RA-L)International Conference on Intelligent Robots and Systems (IROS) 2022
-
 🏆 Best Paper FinalistRobotics and Automation Letters (RA-L)International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2022[arXiv]
🏆 Best Paper FinalistRobotics and Automation Letters (RA-L)International Conference on Biomedical Robotics and Biomechatronics (BioRob) 2022[arXiv] -
International Conference on Robotics and Automation (ICRA) 2022
-
International Conference on Intelligent Robots and Systems (IROS) 2021
-
 Learning for Dynamics & Control Conference (L4DC) 2021
Learning for Dynamics & Control Conference (L4DC) 2021
-
 Conference on Robot Learning (CoRL) 2020
Conference on Robot Learning (CoRL) 2020 -
 International Conference on Intelligent Robots and Systems (IROS) 2020
International Conference on Intelligent Robots and Systems (IROS) 2020 -
International Conference on Robotics and Automation (ICRA) 2020
-
 🏆 Travel AwardAdaptive and Multi-Task Learning Workshop at the International Conference on Machine Learning (ICML) 2019
🏆 Travel AwardAdaptive and Multi-Task Learning Workshop at the International Conference on Machine Learning (ICML) 2019
Talks
- [2025-08-29] "Robot Learning with Sparsity and Scarcity" @ Ai2, hosted by Dieter Fox.
- [2025-05-08] "Robot Learning with Sparsity and Scarcity" @ Persona AI, hosted by Jerry Pratt.
- [2025-05-01] "Robot Learning with Sparsity and Scarcity" @ George Mason University, hosted by Jinwei Ye.
- [2025-04-07] "Robot Learning with Sparsity and Scarcity" @ Meta, hosted by Eftychios A. Pnevmatikakis.
- [2025-04-01] "Robot Learning with Sparsity and Scarcity" @ Amazon FAR, hosted by Christoph Schwerdtfeger.
- [2025-03-26] "Robot Learning with Sparsity and Scarcity" @ RAI Institute, hosted by David Watkins.
- [2025-03-20] "Robot Learning with Sparsity and Scarcity" @ Lehigh University, hosted by Mooi Choo Chuah.
- [2025-03-18] "Robot Learning with Sparsity and Scarcity" @ Fauna Robotics, hosted by Josh Merel.
- [2025-01-28] "Robot Learning with Sparsity and Scarcity" @ NJIT, hosted by Kasthuri Jayarajah.
- [2025-01-16] "Robot Learning with Sparsity and Scarcity" @ Amazon Robotics, hosted by Paul Birkmeyer.
- [2024-10-07] "Robot Learning with Sparsity and Scarcity" @ Stanford, hosted by Fei-Fei Li.
- [2024-07-19] "Learning Tactile-only Exploration and Manipulation Policies" @ RSS 2024 Workshop: Noosphere: Tactile Sensing for General Purpose Robot Learning.
- [2024-02-20] "The Practice of Robot Learning I" (video) @ Columbia, guest lecture hosted by Matei Ciocarlie.
- [2023-09-20] "Robotic Hand Orthoses for Assistance and Rehabilitation After Stroke" @ Global Perspectives on Medicine, Rehabilitation and Robotics Webinar Series.
- [2023-03-24] "Tactile Sensing and Its Applications" @ Columbia, guest lecture hosted by Shuran Song.
- [2023-01-31] "The Practice of Robot Learning I" @ Columbia, guest lecture hosted by Matei Ciocarlie.
- [2022-04-28] "The Practice of Robot Learning II" @ Columbia, guest lecture hosted by Matei Ciocarlie.
- [2022-02-25] "Tactile Sensing and Its Applications" @ Columbia, guest lecture hosted by Shuran Song.
- [2022-02-08] "The Practice of Robot Learning I" @ Columbia, guest lecture hosted by Matei Ciocarlie.
- [2021-10-01] "MyHand: a Wearable Hand Orthosis for Stroke" @ IROS 2021 Workshop: Challenges and Opportunities of Human-robot Symbiosis: from Wearable Robots to Neurorobotics Workshop.
- [2021-09-27] "Dynamic Grasping with Reachability and Motion Awareness" @ Lehigh, hosted by Mooi Choo Chuah.
- [2021-07-14] "Dynamic Grasping with Reachability and Motion Awareness" @ UPenn, hosted by Dinesh Jayaraman.
- [2021-04-09] "Dynamic Grasping with Reachability and Motion Awareness" @ Berkeley, hosted by Yi Ma.
Mentoring
People I mentored at Ant Group:
People I mentored at Columbia:
- Shreenithi Navaneethan (BME MS)
- Bingyao Du (CS MS) → ECE PhD at Purdue
- Xinyue Zhu (Undergrad CS) → CS PhD at UC Berkeley
- Luke Hsu (Undergrad CS) → CS MS at Columbia
- David Choi (CS MS) → Associate Software Engineer at Capital One
- Yuan Qing (MS EE) → CS PhD at Rutgers
- Pedro Leandro La Rotta (MS ME → Machine Learning Engineer at JP Morgan)
- Runsheng Wang (MA Stats → ME PhD at Columbia)
- Dongixao Yang (MS ME → Robotics Engineer at Xiaomi)
- Siqi Shang (MS CS → ECE PhD at UT Austin)
- Zihan Guo (MS ME → ME PhD at Northwestern)
- Wenxi Chen (MS ME → ME PhD at Purdue)
- Patrick Meng (MS CS → CS PhD at Rutgers)
- Yinsen Jia (MS EE → EE PhD at Duke)
- Han Lin (MS CS → CS PhD at UNC)
Teaching
Teaching assistant at Columbia University for:
- Robot Learning (MECE6616) - Spring 2023
- Robot Learning (MECE6616) - Spring 2021
- Computational Aspects of Robotics (COMS4733) - Fall 2019
- Humanoid Robots (COMS6731) - Spring 2019
- Computational Aspects of Robotics (COMS4733) - Fall 2018
- Machine Learning (COMS4771) - Spring 2018
Projects
Misc
- According to this fun website that tracks the academic genealogy, I am an academic descendent of Issac Newton. Here is the specific branch.
- I used to work on computer architecture during my undergraduate years at Edinburgh. I got accepted to DPhil in Computer Science at Oxford University with full funding (Jason Hu Scholarship from Balliol College) when I graduated from Edinburgh. However, in order to explore AI/robotics a bit more than staying in computer architecture for my PhD, I decided to do a master first at Columbia to gain more research experience in AI/robotics.
- This website is built with a single css and html file.